全國服務熱線
全國服務熱線





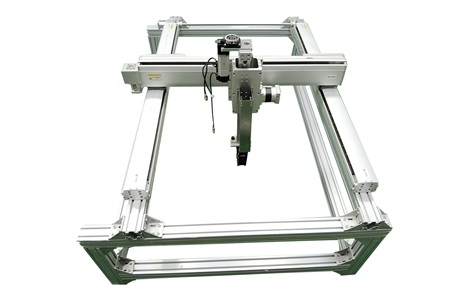
桁架機械手是一種建立在直角X,Y,Z, 三坐標系統基礎上,對工件進行工位調整,或實現工件的軌跡運動等功能的全自動工業設備。其控制核心通過工業控制器(如:PLC,運動控制,單片機等)實現。通過控制器對各種輸入(各種傳感器,按鈕等)信號的分析處理,做出一定的邏輯判斷后,對各個輸出元件(繼電器,電機驅動器,指示燈等)下達執行命令,完成X,Y,Z三軸之間的聯合運動,以此實現一整套的全自動作業流程。
桁架機械手其特點:
1,高效--------其各軸以極高的速度直線運行,可用伺服電機快速響應;
2,穩定-------極小的重復性誤差,最高可達0.05mm;
3,高強度------7x24小時工作,不需要吃飯、睡覺、抽煙等;
4,高精度------定位精度可達0.02mm(基于制作成本原因,可根據使用工況適當放大定位精度);
5,性價比高------相比關節機器人,其負載重量大,制作成本低,適合于“中國智造”基本國情;
6,操作簡單------基于直角坐標體系,其運動參數較為簡單。